天体撮影機材
少年時代から天体望遠鏡にあこがれていたことがありますが,ふと思い出して,デジタルカメラの購入を機に
フィールドスコープと組み合わせて望遠撮影を始めてみました。
月を撮影し,クレーターに驚き感激しました。その内に,天体写真などを撮ってみたくなり,
Meade DS-60EC(オートスター付き)を購入しました。
その時の感激はひとしおでしたが,お決まりの如く直ぐに物足りなく感じるようになりました(笑)。
その後の機材や環境の整備,天体観望と写真撮影についての体験等をご紹介します。これまで計測畑で仕事をしてきた
ので,折々の工夫が何らかの参考になれば幸いです。
2.運用のヒントへ
To Multi-Star Guiding
1.現在の機材
使用機材や撮影スタイルは年々変化するもので,現在活動中の機材等についてまとめてみました。
撮影結果については Image Gallery を参照してください。
[望遠鏡・鏡筒]
Celestron C11 鏡筒(シュミットカセグレン反射,D=280mm, f=2800mm, F10)
Celestron C8 鏡筒(シュミットカセグレン反射,D=203.2mm, f=2032mm, F10)
Meade SN10 鏡筒(シュミットニュートン反射, D=254mm, f=1016mm, F4)
Orion 300 鏡筒(ニュートン反射,D=300mm, f=1200mm, F4)
タカハシ FS-60C 鏡筒(フローライト屈折, D=60mm, f=355mm, F5.9)
タカハシ FSQ-106 鏡筒(フローライト屈折, D=106mm, f=530mm, F5)
[架台]
ビクセン GPD(赤道儀)+スカイセンサー2000PC
タカハシ EM-200 Temma2 Jr.(赤道儀)
GPU Optical FORNAX 51 EQ Mount + Astro Electronic FS2
[カメラ]
SBIG ST-8XME(冷却CCDカメラ, NABG 9x9μm element, 1530x1020 pixels, TC-237 selfguide)
Starlight Xpress SXV-M8C(冷却カラーCCDカメラ,ABG 3.125x3.125μm element, 2312x1720 pixels)
Starlight Xpress SXVF-H9(冷却モノクロCCDカメラ,ABG 6.45x6.45μm element, 1392x1040 pixels)
Moravian Instruments G2-8300(冷却モノクロCCDカメラ, ABG 5.4x5.4μm element, 3358x2536 pixels)
キャノン EOS Kiss D(IRCフィルター換装・冷却改造,ABG 7.4x7.4μm element, 3072x2048 pixels)
[撮影場所]
主として,松山市の自宅2階のベランダ
[撮影の状況]
撮影システムの一つを右に示します。C8鏡筒に ST-8XME(ST-7XMEをアップグレード
したもので,以下ST-8XMEと記す)を付けた状態,CCDビデオカメラWATEC WAT-120N をファインダーとして搭載しています。
焦点距離は Meade 0.63x reducer を使って f=1280mm F6.3 としていますが,撮影天体に応じクローズアップレンズを組み合わせて,F4,
F5.1, F8 などでも使えるようにしています。
鏡筒の先端には自作フードを付けており,黒色のポリエチレンシートをアルミニウムの丸リベットでかしめて円筒形にし,内面には植毛紙を貼り
付けています。なお,C8鏡筒の内面にも迷光防止のために植毛紙を貼り付けています。
極軸周りのカウンターバランスをていねいに調節することはもちろんですが,オートガイドする場合は赤緯軸の回りのバランスを正確にとる
必要があり,鏡筒の左側に0.5kgのウェイトを付加しています。ST-8XME の重心は光軸の右方にあり,電動フィルターの重心も右方にあるため
の措置です。赤緯軸を水平にしておき,鏡筒を水平にした場合と鉛直にした場合のバランスを細かく調整しています。制御ケーブルや電源コードの
重量がかなりあるので,鏡筒の向きによってバランスが変化しないように,束ねて中心付近に固定しています。
重くて固定状態にあるピラー脚を除いては機材の設置と撤収を毎回行っています。赤道儀の設定に関しては再現性があるので,極軸調整を省
略しています。
|
 |
これらの細部について以下の写真で示します。

(a) WATEC WAT-120N |

(b) フォーカス目盛 |

(c) 自作の電動フィルター |
(a) のビデオカメラは天文ガイドが頒布したTGv-Mと全く同じもので,国外では StellaCam II としても販売されて
いるようです。256フレームまで蓄積して積算できるので8.5秒程度の露出が可能であり感度が非常に高いので,冷却CCD
カメラを購入するまでは天体撮影に使っていました。
手軽に撮影できるので,一晩に96個のメシエ天体を撮影したこともありまし
たが,カメラからパソコンまで長いケーブルでアナログデータを転送するために,星像が甘くなるきらいがありました。現在は高感度
のファインダーとして使っています。作動中にカメラの筐体がかなり熱をもってくるので,両側に放熱板を取り付けました。これにより,
長時間使用でもホットノイズは大幅に減少したように思われます。コントロールボックスは本体とは独立しており長く太いケーブル
で結ばれていますが,その重量でバランスを崩し易く取り回しも面倒だったので,ケーブルを30cm程度に切り詰めて,カメラ本体の
背に載せています。鏡筒は50mm口径のファインダーを切断し対物レンズ部分を流用したものですが,ペンタックスKマウ
ント用カメラレンズも装着できます。
(b) はシュミットカセグレン鏡筒の焦点合わせのための目盛です。この鏡筒では焦点調整ノブを回して主鏡を前後させるこ
とにより焦点位置を調節するようになっていますが,ねじのバックラッシュには注意が必要です。焦点を合わせる際は主鏡を前方に
押し出す方向,つまり反時計回りにノブを回して仕上げなければなりません。回し過ぎて逆方向に戻す場合は一旦大幅に時計回りに回して,
再び反時計回りで焦点を合わせることになります。戻す前の位置を記憶しておく必要があるので写真のように目盛を読み取り
ながら進めるのがよいでしょう。F6.3の状態で焦点を合わせる場合,1目盛動かした場合の結像の差は殆ど区別できないので,この程度の目
盛間隔でも十分です。なお,押しねじで固定してバックラッシュを防ぎミラーシフトを回避している例を見かけますが,機構部の撓み
やガタまで解消できる訳ではないので,合焦位置の再現性が保たれているならば上記の措置で十分でしょう。指針は1/8回転毎に付け
替えることができ,目盛位置の再現性もあるので,レデューサを変更した場合でも的確に対応できています。なお,ノブのゴムカバー
は真鍮の軸に対してスリップする恐れがあったので,念のために艶消しスコッチテープを真鍮の軸に貼り付けています。
(c) は自作の電動フィルターで, ST-8XME に取り付けています。カラーフィルターには光映舎の新型LRGBフィルター(M37)
を使っている。最初は WAT-120N で使うために作製したので光路長は17mmに抑えており,
写真のように装着時のカメラを含む重量は1.4kg程度と軽量です。フィルターの交換はボタンを1回押す毎に順に送られ,
L→R→G→B→opaqueをサイクリックに繰り返すのみの単純な制御回路によるものですが,カメラからのカラー制御信
号を区別せずに順送り信号として利用することで,LRGBの自動撮影が何とかできています。カラー撮影の場合でも雲に遮られること
がなければ,セルフガイドの状態で長時間放っておけます(撮影開始後は終わるまで何もすることが無い)。
なお,写真右端のステップモータはかな
り錆びていますが,壊れた携帯用プリンタから取り出した時点で,何故だかこのような状態になっていました。

(d) GPDマウントの補強 |
(e) 補助プレート |

(f) 工作コーナー |
(d) にGPDマウントの補強の様子を示します。14kgの重量がある SN10 を搭載したとき,長いフードを取り付けていたせいも
あって,わずかな衝撃で発生した振動がなかなか収まらなかったことがあります。ゆらゆらと何時までも揺れており,微風でも使いものに
なりませんでした。GPDは首根っこが細過ぎるように思われたので,両側面から厚さ10mmのアルミニウム板で補強しました。この措置で振
動の収まり具合がよくなったように思われます。慣性モーメントが大きい鏡筒ではこのような措置も場合によっては必要でしょう。極
軸の仰角は完全に固定されたことになりますが,ねじを緩めると1度程度の仰角調整の余地は残しています。自宅では固定位置にセットした
ピラー脚で使っており,このように固定されている方がむしろ都合がよいです。遠征などで三脚に載せて使う場合は極軸方向の脚先にアジ
ャスターを入れて,仰角を微調整しています。逆に,EM200ではクランプをきつく締め付けていても仰角が軽く動かせてしまうので
困っています。なお,このピラー脚は知人に作製してもらった頑丈なもので,GPDとEM200とで共用しています。
(注意)GPDの内部は空洞になっており,補強板取り付けのネジ穴を開ける際に切り屑がウォームギア等に入り込んでしまい,
全体を分解して掃除する破目になりました。二硫化モリブデン入りのグリースに替えたり各部を念入りに調整することができたので悪くは
なかったのですが,改造する場合はくれぐれも注意してください。
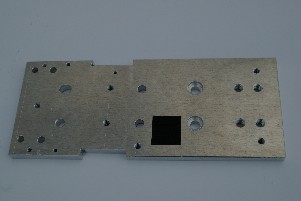
(e) 補助プレートの一つを示します。穴あけやタップ立てが自宅でできるようになったので,必要に応じて穴を開けまくっています。
ガイドマウントを固定するための穴や,タカハシ穴,アリガタ・アリミゾプレート固定用の穴,バランス調整用ウェイトの取り付け穴
などで,たくさん開いている割には無用になってしまった穴は少ないようです。
(f) に我が家の工作コーナーの様子を示します。ある日,ホームセンターの展示処分品で5千円程度の格安のボール盤を衝動買いし
て持ち帰ったものの,大きくて重いので置き場所に困ってしまいましたが,最初のうちは反対していた家内も度々引っ張り出して工作して
いるのを見かねてついに折れてくれました。2階のホールの片隅に場所をもらって,ここに紹介したような改造や部品作りをしています。

(g) Meade SN10 鏡筒 |

(h) オートガイダー |
(i) カメラとシャッター装置 |
(g) は SN10 と一眼レフデジタルカメラによる撮影システムを示します。主鏡筒の右(写真では左)にはオートガイダーを搭載し
ており,総重量は18kgを超えているので,EM200でもいささか重量オーバーになっていますが,ウェイト軸を延長してカウンター
ウェイトの重量増加を抑えており,補助プレートの取付け位置を選ぶことで赤緯軸回りのバランスも取っています。なお,紹介写真で
は鏡筒のキャップは付けたままで,フードの装着やケーブル類の接続もしていません。
(h) にオートガイダーの詳細を示します。ガイド鏡には ADVIX MCW-90(D=90mm, f=1200mm)を用いており,マクストフカセグレン
形式で主鏡を前後させて焦点を合わせる方式ではありますが,ミラーシフトは殆ど気にならない程度です。
オートガイドには Meade Pictor 201XT を使っています。ガイド星をCCDの中心に正確に持ってくる必要はありませんが,CCD面積が狭い
ので,フリップミラーを内蔵していて光路切り替えができるこの鏡筒は重宝しています。上の接眼スリーブにはレチクル入り暗視野照明装置
付きの接眼レンズを付けています(補助リングで上部と下部のピント差を調節。アウトレット品である所以か,上下の視野が大幅にずれ
ている)。また,ありあわせの部品を組み合わせて軽量で広視野の直角ファインダーを作製して取り付けています(エポキシ系接着剤で
貼り付けた)。ガイドマウントは余計な部分を切り落として軽量化しており,上下・左右の傾斜角度を大まかに読み取れるようにして
います。主鏡筒の上部には既に紹介したビデオカメラによるファインダーを装着しています。なお,後方の左右は我が家の洗濯物で昼と夜
で何とか住み分けています。(笑)
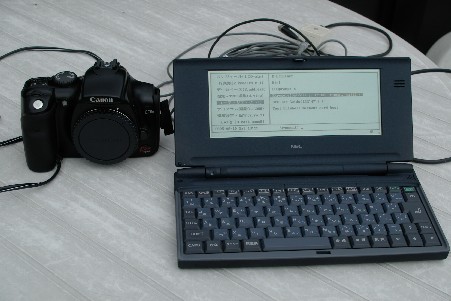
(i) にはカメラ(Canon EOS Kiss D)とシャッター装置(NEC Mobile Gear MC-MK32)を示しました。カメラは自分で改造しており,
IRCフィルターを光映舎のHα透過赤外カットフィルターに交換しました。この改造作業そのものにはさして困難は感じませんでし
たが,組み立ての最終段階でモノクロ液晶へのコネクタの差し込みが十分でなかったらしくて,ショート(原因は接点パターンの交互
配置)してファームウェアの一部が化けたようです。幸いなことに天体撮影で使うには殆ど支障はありませんでしたが,作業する場合は最後の
最後まで気が抜けません(徒然草の「上手の木登り」の話を思い起こさせた)。長いケーブルを使って室内からシャッターが切れるよう
にすると共に,モバイルギアを利用した露出用のタイマーを作製しました。RS-232Cの制御信号を利用するインターフェースを作り,
TBC を用いて簡単なプログラムを組みました。露出時間(s),繰り返し回数,待ち時間(s, デフォルトは
12s)をそれぞれ指定できるようにしました。単3乾電池(実際にはNi-MH電池を使用)2本で長時間動作が可能ですから,遠征時にも使
えて重宝しています。

(j) Celestron C11 & Losmandy saddle plate |

(k) Meade SN10 on the dovetail plate |
(j) はセレストロンC11の搭載状態を示します。付属していたスライドバーは強度不足だったので,幅が広いCGEタイプのものに
交換しました。取り回し易いように鏡筒の上部にアルミの四角チューブを取っ手として付けています。EM-200への搭載はロスマンディのサドル
プレート(タカハシ用)を使用しました。また,ビデオファインダーはスライドバーの下にロスマンディーのアリミゾプレートを介して
取り付けました。なお,フォーカスノブにはC8同様に目盛り盤を取り付けています。
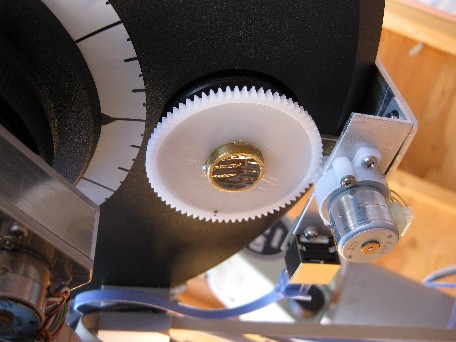 (注)その後,フォーカスノブにギアを取り付けて右写真(クリックで拡大)のようにス
テッピングモータで駆動するようにしました。ノブ1回転当り2304ステップ駆動とし分解能と精度(機械的な強度)は十分に確保できて
います。ドライバは下で述べたH8マイコンに組み入れてPCからのキー入力でステップ数を指定します。
(注)その後,フォーカスノブにギアを取り付けて右写真(クリックで拡大)のようにス
テッピングモータで駆動するようにしました。ノブ1回転当り2304ステップ駆動とし分解能と精度(機械的な強度)は十分に確保できて
います。ドライバは下で述べたH8マイコンに組み入れてPCからのキー入力でステップ数を指定します。
バックラッシュやミラーシフトへの対処については(b)で述べた事と基本的には同じですが,ステッピングモータ駆動によって位置の再現性
は格段に向上しています。
また,Meade SN10についても同型のステッピングモータとギアを取り付けて6μm/step駆動としました。これで,撮影操作などが全て室内
から行えるようになりました(12/16/08)。
(k) は上記のマウント方法の変更に伴い,SN10もロスマンディのスライドバーに載せました。鏡筒バンドの間隔を広めにした
ので強度が増したように思われます。その後,接眼部をクレイフォード方式のものに換え,取り付け部をアルミ板で補強しました。

(l) SXV-M8C & Radial Guider |

(m) SXV-Guider & C mount |

(n) Cooled EOS Kiss D (300D) |
(l) Celestron Radial GuiderにメインカメラとしてStarlight Xpress SXV-M8Cを装着しています。このガイドア
タッチメントは光路長を短くすると共に2インチスリーブ用に改造しました。なお,手前はガイド側のスリーブとしてアルミ棒削り出
しで短めのものを作ってもらいました。
(m) SXV-Guiderと自作したアタッチメントを示します。このガイダーの先端はCSマウント用レンズが使えるようになってい
ますが,当方ではM28のフィルターネジが欲しいところです。やむを得ず,写真手前のものを自作しました。なお,後方の2つのリン
グはSXV-M8Cをガイドカメラとして利用する際に光路長を短縮するか,またはCマウント用レンズを使うためのものです。
(n) EOS Kiss Dに冷却装置を付加しました。ペルチェ素子(TES1-12705, Qc=44Wmax)に4.5Wの電力供給で外気温
-9℃程度まで冷却できました。上記写真の状態での総重量は690gですから,改造後でもマウント時の負担増加は少ないです。なお,
放熱フィンとクーリングファンは振動の影響を避けるためにそれぞれ別支持とし0.5mm程度離して設置しています。
外気温18℃から冷却し撮影したダークフレームと改造前の9℃でのダークフレームのノイズ状態がほぼ同じであったことから,ヒー
トシンク(厚さ1mmの銅板)の外部引き出し効果と相まって,かなりの冷却効果が認められました。ただし,冷やし過ぎると結露の恐
れがあるので,ペルチェ素子の冷却能力に余裕はあるものの,この程度の冷却状態で運用することになるでしょう。
(注)ペルチェ素子の両面に温度差ができても,その時に印加した電力は全て熱に変わるので,放熱板に温もりを感じるような状
態では殆ど冷却されません。却って加熱されてしまうこともあるので,クーリングファンの使用は必須でしょう。

(o) AO(Active Optics) |

(p) AO with Radial Guider |

(q) AO with SBIG ST-7XME |
(o) AO(Active Optics or Adaptive Optics)を作製しました。能動の補償光学と云うよりも,高速の自動ガイド装
置です。EM-200 Temma2 Jr.の赤緯軸駆動のバックラッシュが非常に大きい(0.1倍速で45s程度)ために,極軸を少しずらして
片方向への星の流れを作ることによって何とか自動ガイドしていましたが,全天に亘る安定動作は困難でした。
そこで,写真のようなチップ・チルト(tip-tilt)方式の自動ガイド装置を自作した次第です。総重量は370g,平板ガラス
(φ50mm, t=4mm,BK7の両面マルチコート)の最大傾斜角は±2.8°,像の最大シフト量は±66μmになります(5mmの厚みを予定
したが入手できかった)。
20step/revのステッピングモータを100ppsで駆動しており,Guide CCDの0.1s以下の露光にも対応できます。ただし,MaxIm DLで
X-Y軸を同時駆動していますが,"watch star"のチェックを外しても画像転送と判定処理に時間がかかるので,シンチレーション
のキャンセルには至らないようです。したがって,単なる高速動作の自動ガイドと見なし,撮影条件には特に記載しない
ことにします。
(p) Celestron Radial Guider(改造)を組み合わせるとT2ネジまでの光路長は73mmになります。Starlight Xpress SXVシ
リーズのようにカメラ長が17.5mmの場合は,90.5mmの作動距離となりますが,写真のようにSXV-Guiderと組み合わせる場合は,
そのCCD面から小プリズムまでの距離的な制約から,T2ネジ以降に光路延長リングを入れる必要があります。また,EOS Kiss D
などもTマウントを介して装着できます。
(q) SBIG ST-8XMEを装着したもので,写真のように電動カラーフィルターホイール(自作)を付けた状態でのCCD面まで
の全光路長(作動距離)は80mmになります。なお,AO装置(90x90x22mm)の鏡筒への取り付けはM57ネジによっており,内側に
フィルター用のM52ネジが付いています。AOの制御は主カメラを通さずに後述のH8マイコンから直接行っています。
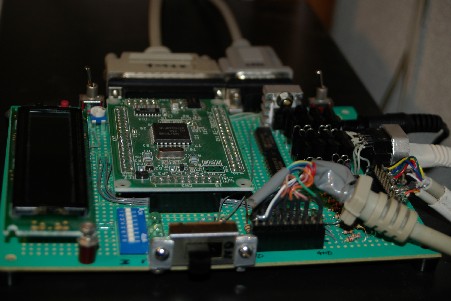
H8マイコンによるAO駆動回路の基板の様子を右の写真に示します。
基板中央部のドータボードはCPU部分であり,配線済みのものを購入しました。基本的にはこのボードのみで動作しますが,マザーボー
ドにはCPUの入出力ラインがコネクタを介して接続されていて,EEPROM writer回路と左端の液晶表示部から成っています。
これまで,PEC(periodic error correction)装置やDSLR用のシャッター・タイマー回路を組み込んで使っていましたが,
今回新たに,上述のAO用にステッピングモータの駆動回路を右側に組み込みました。2個のCMOS ICと16個のトランジスタ,
16個のダイオードが所狭しと並んでいます(バイポーラ用ドライバICを使う方がコンパクトでよかったかも知れない)。
モータへの結線には8芯のLANケーブルを使っており,その手前のコネクタからのガイド出力はTemma2のコントロールボックス
端子に接続しています。右手前のコネクタにはプリンタケーブルを繋ぎ,オートガイド信号のLPT出力を利用しています。
また,手前中央に見える不細工なSWは起動時のMaxIm DSLRからのシャッター駆動出力の誤動作を防ぐために追加したものです。
基板後方の2つのコネクタはPCのコマンド入出力用とDSLRシャッター用のRS-232Cケーブルのものです。基板はこのように
室内のPC上にむき出しのまま置いています。なお,プログラムの開発にはC言語を使いました。
|
|
タカハシ EM-200 Temma2 Jr.は上述のように,赤緯軸駆動のバックラッシュが非常に大きいので自動ガイドが難しいきらいが
あります。
このバックラッシュの大部分はステッピングモータ(Sanryusha P43HG Steps 24, Gear ratio 1/250)のギアヘッドに起因します。
このギアはモータの筐体に組み込まれているためにギャップ等を調整することはできません。そこで,バックラッシュが比較的少な
いと思われるモータ(Orientalmotor PK223PA-SG36 Steps 200, Gear ratio 1/36)に取り替えました(10/25/07)。
これによりバックラッシュは従来のほぼ半分に減少しました。また,天体の自動導入も正常に機能しました。
モータ取替えの計画段階では,Temma2 Jr.赤緯軸駆動回路のマイクロステップの適合性,コイルの抵抗値が異なる,
ギア比が異なる(1/30が必要であるが,入手できるのは1/36)等の問題点が考えられました。それぞれについて調査した結果,問題
ないとの感触を得ることができたのでついに実施に踏み切ったものです。
工作の要点を参考のために述べておきます。モータの出力軸の径が従来(オリジナル)のφ4mmからφ5mmになるので,ギアのボア
アップが必要です(後戻りできない加工)。ギアの軸がぶれないように精密に加工する必要があるので,ボール盤では不可能
ですから,旋盤で中刳りしてもらいました。また,シャフトが従来よりも5mm長いので,厚さ5mmのアルミニウム板をモータとの間に挟
みました。極軸望遠鏡の視野を確保するために,モータを従来とは90度右回しの方向で取り付けました。ただし,モータをプレー
トに固定した状態では赤緯体の入り口を通過できないので組み立て時には注意が必要です。
参考までに調整について触れておきます。2軸のモータを取り付けている厚さ2mmのプレートは中央付近を2本のビスで止めている
だけですから,赤緯軸と赤経軸駆動ギアのギャップはこのビスの締め込み位置で調整することになります。赤緯体の開口部を
上に向け,プレートを水平にし,ビスを微かに締めた状態でスライドと回転操作でギアの位置を調整します。ビスを締め込ん
だ後に赤緯体を180度回して覗き窓(ウォーム軸とモータ軸の中間にあるマイナス溝のネジを外した状態)からギアのかみ合わ
せを確認します。ウォーム軸を指先で正転/逆転方向に小刻みに動かしてルーペなどでギャップの程度を確認するとよいでしょう
(閉め過ぎないこと)。
なお,ウォームギアとホイールギアのギャップについては,2本のM6ボルトの止め加減(ハウジングの位置)で調整するように
なっていますが,組み立て時に接着剤で固定されているとのことで今回は弄らないことにしました。(その後,ウォームギアの
調整(4/03/09)を行って好結果を得ましたが,かなり微妙な調整だったのであまりお勧めできません)
 遠征用のVIXEN GPDはSkySensor 2000PCで駆動していましたが,長時間の追尾安定性と自動ガイドにやや難があったので,
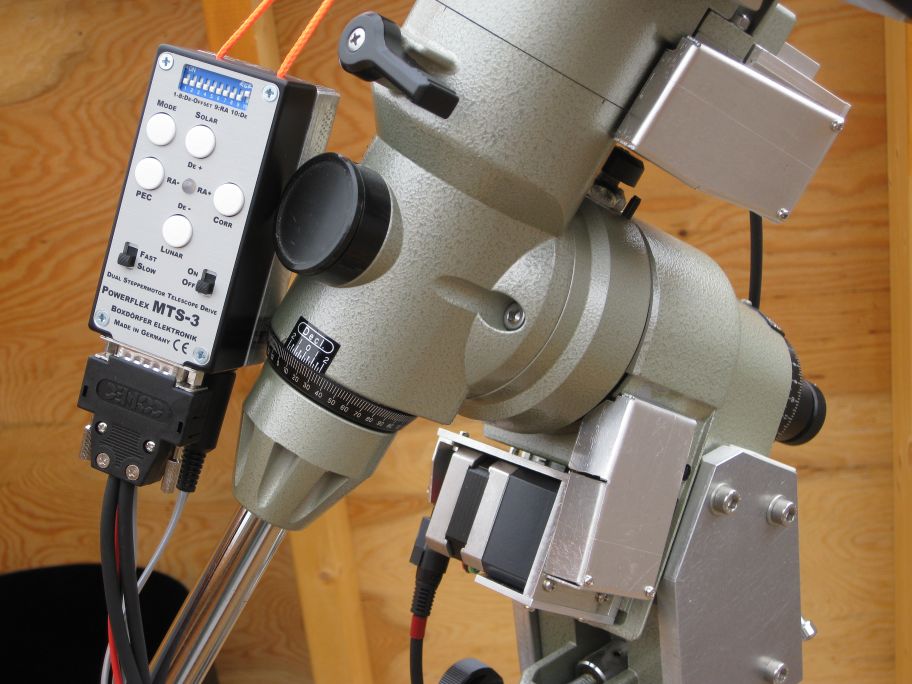
Boxdoerfer Elektronik社のPowerFlex MTS-3 SDI+(以下,MTS-3と略す)に変更しました(6/10/09)。
遠征用のVIXEN GPDはSkySensor 2000PCで駆動していましたが,長時間の追尾安定性と自動ガイドにやや難があったので,
Boxdoerfer Elektronik社のPowerFlex MTS-3 SDI+(以下,MTS-3と略す)に変更しました(6/10/09)。
左の写真(クリックで拡大)のように,ステッピングモータにはオリエンタルモー
ター社のPK243PA-SG9を使い,ウォーム軸側の45歯のギアは従来のままとし,平ギアでの減速比は40:45としています(45歯のため
にギアカバーを大きくしている)。導入時の最高速度は250倍速に設定しています。なお,SS2000PCのモータ(MT4)には36歯の平
ギアが付いたままですから,それぞれ1本のM6ボルトで手軽に元の状態に戻すことができます。
ノートパソコン(ASUS Eee PC 1000HE)でSuperStar IVを使って天体を自動導入しており,まずまずの結果を得ています。MTS-3
起動時のアライメント調整はSS2000PCの場合と同様に,鏡筒の水平東(または西)を起点とすることで基準星探しを省略しています。
次いで目的の天体付近の明るい星を自動導入し同期(再アライメント)しています。追尾動作は恒星時モードの他に太陽時と月モー
ドが使えます。
自動ガイドは0.5倍速(変更可能)で行い,まずますの結果を得ました。ただし,ステッピングモータの駆動は64分割の正弦波に
よるもので滑らかな恒星時追尾動作を示しますが,摩擦抵抗が大きいメタル軸受けのGPDでは自動ガイド時の微小な補正動作にやや
不満が残りました。そこで,高荷重対策の二硫化モリブデン入りグリースから摩擦が少ないと思われる通常のグリースに戻しました
(オーバーホール)。
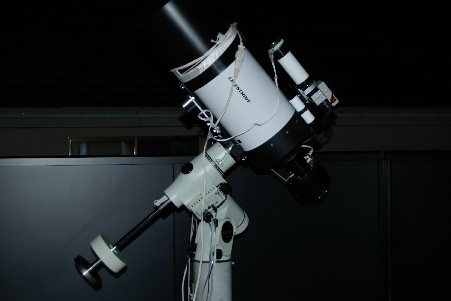
天体撮影の状況を上の2枚の写真で示しました。左は室内で望遠鏡と冷却CCDカメラをコントロールしている様子,右はベランダで動
作状態にある望遠鏡の写真です(9/07/05 22:47 カシオペア座γ星方向)。C8鏡筒とファインダーの筒先にはヒータを巻きつけ
て夜露対策をしています。
室内と云っても広い部屋などではなく,クロゼットの中でタンスと同居させてもらっています。(笑)
左のCRTモニタはマイコンの黎明期に使っていたもので,再び現役に戻って,WAT-120N のモノクロ画像を映しています。対角線方向で
約2度の画角になっており,赤道儀の初期設定の際でも基準星が画面内に入ってきます。カメラの感度を上げると殆どのメシエ天体がモ
ニタ上で確認できます。モニタ画面の中央(カーソルの中心部)にはCasγが映っています。また,これにより夜空の状態もある程度チェッ
クできます(ドアを開けなければ空が見えないので,撮影中はこのモニタ画面が唯一のより拠でもある)。
右の17インチモニタはWin XPを表示しており,右の窓は望遠鏡制御の SuperStar IV Professional Edition で,
左の窓は CCDSoft の撮影画像(焦点調整画面)でありフレームの中央(カーソルの中心部)にCasγが白く大きく映っており,
下の窓は同じくカメラの制御状態と冷却温度を示しています。このように右の窓をアクティブにした状態でも,左窓のカメラの撮影画像
表示は刻々と更新されるので,目的天体とその位置が確認できます。なお,画面右下はWin XPの草原(壁紙)です。
このようにシステムを自動化したことで,室内でゆっくりとコーヒーを飲みながらでも,気楽な星空散歩や天体撮影ができて
います。ただし,光害がひどいので写真の質をあまり望めそうにないのは何とも仕方のない所です。
赤道儀と鏡筒を収納し常設するための小屋を作製しました(4/28/08)。
材料はツーバイフォー(2x4)材と厚み12mmの針葉樹合板を用い小屋の総重量は150kg程度です。左の写真は昼間バージョンで,
屋根はグラスファイバー入りの塩ビ波板を使い,アルミフォイルとポリスチレンフォームで断熱して,日中でも15cm径の換気扇の
みで2℃程度の温度上昇に抑えています。なお,正面の入り口部分には鳥の侵入を防ぐためにフェンスの端切れを細工して写真のよ
うに取り付けています。
夜間や雨天では入り口を板で塞いでいます。その場合の密閉度はかなりよいので,除湿機を作動させても降雨時に除湿される水
分量は少なく,連続排水の必要性を感じさせない程度に仕上がっています。
右の写真のように観測時には屋根を全開するので,これまでとほぼ同じ視野が確保できています。ただし,Celestron C11鏡筒で
の天体撮影と収納については問題ありませんが,ベランダの面積と屋根の開閉操作の制約から床面積を小さくしたので,フォーカス調整
などの操作面で少し制約が生じています。また,屋根の重量がかなりあるので台風対策としてはよいのですが,その開閉操作にかなり
大きな力を要するのが難点です。
このように手狭ながらも天体撮影機材を常設できたので,今後の稼働率に期待しているところです。
2.運用のヒント
天文分野での写真撮影や天体観望に関するコメントなどを思いつくままに記してみようと思います。何らかの参考になれば幸いです。
[冷却CCDカメラの乾燥剤について]
SBIG社のカメラでは,冷却時の結露や氷結を防止するための乾燥剤としてモレキュラーシーブが使われています(メーカからの回答)。
大容積のチャンバーであるにも関わらずCCD素子を零下数十度まで結露せずに冷却できているのは驚くべき状況です(注)。
それだけに,気密性と乾燥剤には注意が必要です。o-リングが数箇所使われていますが,化成処理したアルミニウムの表面には微細な
凹凸があるので,気密性を保つにはo-リングに真空グリースを薄く塗布するとよいでしょう(メーカからの回答では,「(塗布は)必要であ
ろうが,塗布していない」とのこと)。
乾燥剤の再生には175℃4時間の加熱がマニュアルで推奨されていますが,容器入り状態での加熱-減量曲線から10時間以上の加熱が
必要であることが判りました。当方では長時間の加熱が無理なくできるように,アルミニウムブロックと100Wの半田ごて(半波整流で50Wに
落とした)を利用して加熱装置を作製しました。温度の調節は半田ごてのブロックへの接触具合で行う簡単なものですが,自然放熱と
バランスして温度は実用範囲内(160~180℃)に保つことができました。なお,乾燥剤容器から内容物を取り出して急速に加熱するのは,
微粉末化して飛散する恐れがあるので薦めません。
シリカゲルは入手し易いのですがこのカメラの乾燥剤用途には向かないように思われます。シリカゲルは低温での吸湿能力は非常に高い
ものの,室温以上の
温度にさらされる使い方では吸湿能力が大幅に低下するからです。シリカゲルは親和性が低いので100℃以下でも脱離して容易に再生
できますが,モレキュラーシーブは極性があるので吸着力が強くて150℃以上でなければ再生できないことからも両者の吸湿特性の違いが判
ります。通常,モレキュラーシーブの再生は250℃程度で行います(SBIGカメラの場合は乾燥剤容器底部の耐熱性で制約がある)。
(注)-20℃での露点は室温(20℃)の相対湿度に換算すると4.4%に相当します。この湿度はドライボックス等ではとうてい実現できないので,
カメラを通常の乾燥状態で保存したとしてもCCDが冷却時に結露(氷結)するようになる時期を多少遅らせる程度の効果でしかありません。
因みに,ペルチエ冷却で除湿しているドライボックスは室温(20℃)で湿度40%に保つためにはフィンを5.4℃まで冷却する程度です。
[レデューサの縮小倍率について]
焦点距離が長いシュミットカセグレン鏡筒などの場合,直焦点の写真撮影では凸レンズ(レデューサ)を入れて合成焦点距離を短くして
使われることがあります。また,コマ収差や球面収差を低減する目的でも同じレンズ系が使われています。当方でも,Meade x0.63のレデューサ・
フラットナーをよく使っています。また,カメラ用のクローズアップレンズを組み合わせて使うこともあります。そこで,縮小・拡大倍率mの計算
式を以下に示しておきました。
m = -b/a = (f-b)/f
ここで,bはレンズから像までの距離,fは焦点距離(凹レンズでは負),aは物体位置でレンズの
後方(虚物体)では負とする。
例えば,f=400mm, b=55mm の場合は m=0.86 となり,縮小倍率は0.86です。逆に,像位置に100mmを推奨しているx0.63レデューサの
場合,m=0.63, b=100mm を代入するとf=270mmとなることも判り,レデューサを転用する場合でもこの焦点距離を基に再計算する
ことができます。また,対物レンズ系のフォーカス位置は a=-159mm となり,レデューサの後方159mmに像が結べるような作動距離(バック
フォーカス)が必要であることも判ります。ただし,厚みがあるレンズや組み合わせレンズではフォーカス位置は単にレンズ中心からの距離では
ないことに注意してください。また,カセグレン鏡筒などではフォーカス位置によって対物系の焦点距離が変わることも念頭に置いておく
必要があります(注)。
同様にして,バーローレンズのような拡大レンズ(凹レンズ)でも同じ計算式が使えます。例えば,f=-150mm, b=150mm では,m=2.0 となり,
2倍の拡大率となります。双眼装置のマルチプライヤー(2.0x)にはこの程度の焦点距離の凹レンズが使われており,装着位置を変更した場
合の拡大倍率についても計算できます。また,これを直焦点撮影でのマルチプライヤーとしても使うことができます。
以上のように倍率の計算そのものは簡単ですが,良像が得られるレンズの組み合わせと作動距離(倍率)を慎重に選ぶ必要があります。
(注)カセグレン鏡筒の焦点距離fは主鏡と副鏡による合成焦点距離ですから,上の式を使って同様に計算することができます。
f = f1*m2 = f1*(f2-b2)/f2 = (f1/f2)*(f2-b2)
ここで,f1は主鏡の焦点距離,m2は副鏡の倍率,f2は副鏡の焦点距離(凸面鏡では負),b2は副鏡から像までの距離とする。
この式によって焦点距離が求まります。C11鏡筒ではF2.0の主鏡が使われており,f1=560, b2=600, f=2800 で計算すると f1/f2=560/(-150)=
-3.73 になり,作動距離(フォーカス位置)を10mm伸ばすと焦点距離は37.3mmも伸びることになります。
余談ですが,この時の主鏡と副鏡の距離dは a2=-b2/m2=-120 から求めることができ,d=560-120=440mmとなります。一方,薄レンズの
合成焦点距離の一般式は 1/f=1/f1+1/f2-d/(f1*f2) ですから,f=2800, f1=560, f2=-150をこの式に代入すると d=440mm となり,当然のこ
とながら両者は一致します。しかし,この一般式からだけでは上記の状況はなかなか見えてこないので,上で述べたように目的に応じて計
算式を導き出す(応用問題を解く)必要があります。
[赤道儀の極軸調整について]
赤道儀を有効に使う場合には極軸の仰角と方位角調整が必須です。極軸望遠鏡(以下,極望と略す)を使えば手軽に調整できます
が,仕上がりはその精度に依存します。GPDでは極望の倍率が低く,それ自身のセンターも正確に合っていませんでした。また,EM200
でも回転目盛の中心位置はかなり合っているものの,極軸を回転させてみると視野中の中心目盛は少し偏心していました。つまり,両者
とも極望の光軸が極軸に正確に一致していないことになります。このような状態では極望のみで極軸を精密に合わせることはできません。そこ
で,ドリフト法(drift alignment)について以下にまとめてみました。
昔ながらの手法ではありますが,実際に星を眺めて極軸の仰角と方位角を微調整する他はありません。まず,極望を使って,ある程度
極軸調整ができている段階からスタートします。最初に方位角の微調整から始めますが,基準星には天の赤道付近にある南中1時間程度前また
は南中を少し過ぎた星を望遠鏡のレチクル入り視野(調整精度に見合った倍率)の中心に入れます(当方ではC8鏡筒とST-8XMEを使う)。
数分から数十分の星の動きを監視して天の南北方向(Y軸方向)のずれを検出し,ずれとは反対方向に星がくるように方位角調整ねじを
動かします(ツマミの回転角を記録しておく)。次にこの星を再び視野の中心に置いて,上述の作業を繰り返し,星の南北方向のずれがなく
なるまで方位角の調整を行います。
以上の作業が済んだら,極軸の仰角調整に移ることになりますが,新たに基準星を選びます。原理的には東または西の地平線
近くの星が候補になりますが,大気差のために天の南北方向への見かけの動きも僅かながら生じるので,精密調整には向きません。そこで,高度
が低くて鉛直方向に日周運動している状態の星を選ぶことになりますが,方位45度(315度も可),高度45度付近の星が該当します(プラネタリ
ウムモードで赤緯線が鉛直(赤経線が水平)方向の箇所)。この星を基準星として,時間と共に天の南北方向(Y軸方向)に
ずれなくなるまで仰角の微調整を繰り返します。なお,これらの調整中に視野内で星のPM(periodic motion)が生じますが,ずれの検出と
は直交する方向(X軸方向)の動きですから気にする必要はありません。
これらの調整作業は手間と時間がかかり,日常的に行うようなものではないので,調整終了後に極望の癖を確認しておくと,
移設した場合などでの再調整に役立つと思われます。なお,極望の日付目盛は1日の内で時間帯を考慮したとしても,4年周期で最
大1日のずれがあることにも注意する必要があります。また,方位角を正確に合わせ易い時間帯と仰角を正確に合わせ易
い時間帯がそれぞれ存在することも予め調べておくと調整の精度をあげることが可能です。
[ビデオカメラの接続ケーブルについて]
ビデオカメラ WATEC WAT-120N からの信号を10mの3C-2Vケーブルでつないでモノクロモニタに映したとき,1つの星が点々と幾つ
も連なって画面に現れたのには驚きました。これはインピーダンスマッチングの問題であり,伝送ケーブルの終端で開放状態(負荷抵抗が無
いか,または抵抗が大き過ぎる)になっていると,星像によるパルス信号(電気エネルギー)が消費されずに反射を繰り返すからです(リン
ギング現象)。
モニタには75Ωの負荷抵抗をSWで付加できるようになっていたので簡単に解決しました。一方,WATEC WAT-502B は周波数特性がそれ程よく
ないためか,負荷抵抗がなくてもリンギングは殆ど発生していなかったので,インピーダンスのマッチング(整合)についてはその時点
まで気にせずに過ごしていたことになります。現用のモノクロモニタの入力部に負荷抵抗をハンダ付けしました。
同様の現象はビデオキャプチャの入力回路でも発生するので注意してください。当方のビデオキャプチャ基板でも75Ωの負荷抵抗をハンダ
付けしたところ,リンギングが解消されてキャプチャ画像がスッキリしました。このような措置を講じることは製品を改造することにもなる
ので,よほどの事情と確実な効果が望めない限り改造には踏み切れないものですが,この事例が参考になれば幸いです。なお,75Ω
の負荷抵抗はRCAコネクタ部分に組み込んでも同様の効果が期待できます。(天文ガイドのTGv-Mでは周知の事実だったかも知れない)
[GPDのバックラッシュについて]
ビクセンGPD赤道儀をスカイセンサー2000PCと組み合わせて使う場合は駆動系のバックラッシュをRA, DEC軸ともに100以内の補正
係数に収めたいところです。そのためには,駆動モータ系の出力軸とGPDのウォームギア軸を
結合している平ギアの噛み合わせを調節することが重要だとされていますが,これの全バックラッシュへの寄与はかなり小さいものです。
DCサーボモータに直結されたエンコーダで検出してから赤緯軸が実際に動き出すまでにはバックラッシュをもつ多くの駆動系が介在していま
す。モータ系の出力軸までの減速ギアのバックラッシュは調節できないので除外するとして,最も影響が大きいと思われるのはウォーム
ギアとウォームホイールとの噛み合せ,ウォームギア軸のスラスト方向のガタです。前者は押し引きネジで調節し簡単な作業で済みますが
微妙な調整を要するのでその詳細については割愛し,後者についてのみ説明します。
一体加工されたウォームギアシャフトはメタル軸受けで支えられているので,磨耗によってスラスト方向のガタが生じ易いようです。それにも関わ
らず部品の形状をみる限り適切な調整箇所が見当たりません。メーカに問い合わせた所,いきなり工場送りを勧められてしまいました。それでも販
売店を通じて聞いてもらった所,工場でも単にナットを緩めて軸受けボルトを手で締めているだけだと判りました。やはり,専用の締め付け工具
を使うための切り欠き溝やピン穴が用意されて然るべきでしょう。この調整作業は非常に簡単なものですが,バックラッシュを劇的に減らすこ
とができるので,スラスト方向のガタを感じた場合は実施を勧めます。作業の際は軸受けボルトを締め過ぎないように,平ギアの噛み合せを
外してフリーの状態で様子を見ながら調整するとよいでしょう。
他メーカ(外国)の赤道儀の宣伝文句を見ると,廉価な普及型でもウォーム軸受けにはボールベアリングを採用するようになったよう
です。軸受けのガタを少なくしウォームギア噛み合せ状態の狂い(バックラッシュの変化)を少なくするためには当然の措置だと
云えます。
[EM-200のピリオディックモーションについて]
タカハシEM-200は優れた赤道儀ですが,恒星時追尾駆動においてかなりのピリオディックモーション(以下PM)が見られま
す。M77付近をf=1016mm, EOS Kiss D, 8min露出で撮影した 写真では星がダブったように写ってい
ました。この原因としては極軸駆動のバックラッシュやガタを疑ってみたくなるところですが,視野中の星の動きを追跡してみると恒星
時追尾のPMによるものであることが判りました。下の写真(a)はオリオン座ε星付近をf=1600mm, EOS Kiss D, 16min露出,DEC軸を北
へ低速で駆動しながら撮影したものの一部(トリミング)で,PMの2周期分に相当する星の動きを示しています。ここで,計算上の1
周期は478.69秒です。波形の山と谷の部分では上下(RA軸)方向の動きは少ないですが,その中間では急激に変動しているために前述
の写真のように星が二重に写ってしまうことになります。この時のPMの振幅は画像から±4.5秒角程度であることが判りました。なお,星が
右斜め下に向かって移動しているのは,カメラのセッティング角度と恒星時追尾速度の誤差によるものです。

(a) PM(2周期分) |

(b) PEC on(2周期分) |

(c) 平滑化PEC(2周期分) |
この程度のPMでは焦点距離が300mm以上になると比較的短時間の撮影でも問題になってきます。
そこで,H8マイコンによるPEC(periodic error correction)を付加してみました(C言語でプログラム開発)。
結果を写真(b)に示します。DEC軸の駆動速度は少し異なっているが振幅のスケールは同じですから,PMは数分の一に減少したことが
判ります。この写真では周期が短い鋭い動きが残っているので,キャリブレーション時のデータを滑らかな補正曲線となるようにエディタ
で編集して制御した結果を写真(c)に示します。PMの振幅がさらに小さくなるとともに,追尾の動作も滑らかになっています(2周期目の
サグについては原因不明)。
補正データを積算しExcelでグラフ化してみると,当然のことながら,(a)の写真と全く同じ形状になっています。目視(当方ではモニタ
画像)でキャリブレーションする場合はシンチレーションに惑わされて余計な補正をし勝ちですから,多数回上書きしても収束するこ
とは殆ど望めません。そこで,(b)のような写真を解析して補正データを修正しています(平均値を使ったことに相当)。PMの再現性がよ
ければ,原理的には残留PMを限りなくゼロに近づけるこができます(PPEC: permanent periodic error correction)。また,極軸の設
定誤差や大気差による追尾速度の修正も兼ねて,RA軸・DEC軸共に一定速度の微小送りを随時指定できるようにしました(上の写真撮影
ではDEC送りを指定)。PECスタートのタイミングはRAウォームギア軸の回転を小型モノクロビデオカメラでモニタして1秒以内
の精度で検出しています。なお,RA軸回りの重量バランスは重要であり,恒星時追尾とは反対向きに軽い抗力(東側を重くする)を与え
るようにしています(抗力の向きでPMの形状が変わる)。
このPECを使ってオリオン座ζ星とNGC2024付近を撮影した結果を示します。これは Meade SN10 f=880mm
F3.5, EOS Kiss D, 10min露出での4枚のうちの1枚であり,いずれもほぼ同じ結果が得られました(4枚目は雲が白く写っていた)。
ピントは少し甘いですがPM(画像では左右方向)が抑えられていることが判ります。
この場合の追尾精度はオートガイダーを使った場合に比べて劣る
かも知れませんが,雲が通過してもガイドパニックに陥ることはないので,気軽に撮影(粗製濫造)できるようになりました。また,冷却CC
Dカメラをセルフガイドする場合でも滑らかな補正曲線のPECを併用すると高精度の追尾が期待できそうです。一般に,誤差を検出してから
補正するのでは制御の時間的な遅延と検出感度によって誤差そのものがゼロになることはないので,上記のようにシステムの追尾誤差を
予め小さくしておくことは十分に意味があると思います。ただし,上空の気流変化によるシンチレーションや風などの外部擾乱によるランダムで高
速の変動については別途対策が必要です。
(注意)EM-200 Temma2/Jr.ではRA軸の微動送りの時分解能は高くない(プログラム開発関係者談)ので,一定量の微調整を頻繁に
行うような場合は変動幅が最も小さい恒星時0.1倍速を選び,デューティサイクルを長くするのがよいでしょう。ただし,この0.1倍速では
Temma2 Jr.のDEC軸のバックラッシュは45秒にもなる(メーカの出荷基準内?)ので注意を要します。(その後,DEC軸の駆動モータを
バックラッシュの少ないものに取り替えました。前述の改造状況を参照)
[対物レンズの焦点距離測定について]
直焦点撮影する場合,対象天体によって焦点距離を自由に選ぶことができます。しかし,画像を評価する場合は星の角距離や星雲な
どの見掛けの大きさをできるだけ正確に知りたいと思うことがあります。銀塩カメラではDPEを選べませんでしたが,CCDでは画素サイズが
カメラによってそれぞれ決まっているので,その特徴を活かしたいものです。そのためにはレンズ系の焦点距離を正確に知る必要
があります。
対物レンズや反射鏡を単独で使う場合はメーカの公称値を使うことで問題はないと思われますが,レデューサを組み合わせて使う場
合も含めて,CCDを使って正確に測定する方法を考えてみました。二重星などの正確な角距離θが判っている天体を撮影し,
そのCCD面上の距離dから,f=d/tan(θ)により計算することができます(注1)。ただし,レンズ系の収差やCCDのカバーグラス等の影響
については考慮していないので短焦点では注意してください。
この目的に使えそうな天体として,おおぐま座のミザールとアルコルが考えられます。
スミソニアン・カタログ(Smithsonian Astrophysical Observatory Star Catalog)のAlcor(13h25m13.498s, +54゚59'17.15")と
Mizar(13h23m55.55s, +54゚55'31.39")のデータから球面三角形の余弦定理を使って計算してみますと,708.30124"が得られました(注2)。
この角距離を使って対物系の焦点距離を求めることができます。同じ対物系で散開星団や球状星団を撮影して,それぞれの星の角距
離を求めることもできるので,それを副基準として様々な倍率や焦点距離に対応できるはずです。
(注1)厳密にはFOVpp(field of view per pixel)が求まるだけですが,CCDは精密な製版工程を経て製造されるので画素サ
イズは正確だと考えられるので,求めた焦点距離も信頼できます。
(注2)原式のままで数値計算すると微小角距離ではひどい桁落ちが生じるので,桁落ちが少なくなるように計算式を工夫しました。
原式は cos(a)=cos(b)cos(c)+sin(b)sin(c)cos(A) ですが,これを変形して,
(sin(a/2))^2=(sin((b-c)/2))^2+sin(b)sin(c)(sin(A/2))^2
としました。ここで,aは求める角距離,b,cはそれぞれ北極点からの角度,Aは経度差です。(連絡下されば実行形式の計算ソフトを
送ります)
なお,微小角の場合はsinθ≒θで近似すると,上式は a^2=(b-c)^2+sin(b)sin(c)A^2 となり,平面のピタゴラスの定理に帰着
することが判ります(経度については単純な算術平均ではなく相乗平均となっている)。
[Color CCDのカラー変換処理について]
冷却モノクロCCDカメラでは長時間露光で撮影するか,短時間露光の場合でもかなりのフレーム数をコンポジットすれば,淡い天体
でも比較的滑らかな画像が得られます。その撮像のカラー化でもノイズを目立たなくすることができます。しかし,カラーCCDカメラは
感度が低く冷却してもノイズが目立つ傾向にあるので,淡い天体の撮影や光害地での撮影には向かないとされています。そこで,当方の
One-shot Color Camera(Starlighr Xpress SXV-M8C)を活用するために,ベイヤー配列データからのカラー変換と画像処理方法に
ついて検討してみました。
ベイヤー配列のデータでも長時間露光でランダムなノイズは各RGB画素毎に均質化されるのでS/N比が向上し,滑らかなカラー画像
が得られることはモノクロCCDの場合と同じです。しかし,露光時間を長くするにも限界があるので,通常は複数のフレームを撮
影し加算・平均化処理することになります。そのS/N比を効果的に向上させるには,多数のフレームをコンポジット
(加算・平均)した後にカラー変換することが考えられます。
ベイヤー配列ではR画素は全画素の1/4しかないので,カラー変換時にRデータが無い画素では隣接するR画素から補間されます。もし,
1個のR画素にノイズが重畳された場合は,カラー変換操作により周囲の複数の画素にその影響が及ぶことになります。つまり,ノイズ生
成による影響は各画素に対して独立事象ではないので,カラー変換された後の画像を加算・平均しても色むらが残ってしまいます。一方,
カラー変換する前に加算・平均すれば,ノイズの影響は各RGB画素で独立事象となるので,長時間露光の場合のS/N比に近付くことにな
ります。
なお,この操作を行う場合の注意点として,コンポジットの際にフレーム毎の星像の位置合わせはできないので,セルフガイドやオフ
アキシスガイドをする必要があり,できればAO(Active Optics or Adaptive Optics)による高精度の追尾制御が好ましいです。また,
フラットフレームの適用は周辺減光の補正だけでなく,各RGB画素の感度を規格化するためにも必須です。さらに,欠陥(ホット/クール)
画素の処理も重要です。

カラー変換後にコンポジット(通常の方法) |

コンポジット後にカラー変換 |
上の画像はSXV-M8Cのベイヤー配列データをそれぞれの条件で処理したものです。月齢11.5日(11/21/07)でのIC342の撮像は月光に
よる散乱光でバックグラウンドレベルが高くてノイズに埋もれていたので,10分露光の画像11枚をコンポジットすることでノイズの
低減を図りました。このようにカラーCCDカメラのS/N比を向上させるには,ベイヤー配列のまま加算・平均するのが効果的である
ことが判ります。
[CCDのクリーニングについて]
CCDのカバーグラス上のダストは撮像の質に直接響いてくるので,常に清浄に保つ必要があります。SBIG ST-7XMEの場合は前板を開けて
シャッターの間からエアブロアーで軽く吹かせるだけで解決しました。しかし,Starlight Xpress SXVF-H9は購入直後にルーペで確認で
きる程の大きなダスト(塵)が付いていました。ピンホールテストでは明るい輝点となって現れ撮影画像に深刻な影響を及ぼしたので,
カメラ筐体を分解してCCDカバーグラスのクリーニングを行いました。
カメラ筐体の分解では後部の2本のネジを外し,外套をスライドさせて外部電源の基板上のプラスチックのコネクタを外します。
CCD部分を止めているのは長い6角柱の2本のネジのみですから,これをプライヤーで緩めて外しました。(これは英文マ
ニュアル通りの操作であり,それとは90度方向にある2本のなべネジを緩めてはいけません。マニュアルをしっかり読む必要があります
が,科学技術系の英文を読むのが苦手な方は下記に連絡下されば何らかのアドバイスができるかも知れません)
なお,分解する場合の注意点としては力まかせに引っ張ったりしない事です。勢い余って他にぶつけるか反動で互いに衝突させて
しまう恐れがあります。適合するドライバなどで軽くこじるようにして,制御できる小さな動きで作業することです。前置きが長く
なりましたが本題に移ります。
軽いダストはエアブロアーで吹き飛ばすことができますが,同時に空中のダストを吸い込み吹き付けてしまう恐れがあるので注意が必要です。
今回のダストは吹き飛ばすことはできませんでしたが,シルボン紙を折り畳んだ角で軽く触れて取り去ることができました。(ダストの物質
によっては,いきなりクリーニング液を使うと溶解して塗布してしまう恐れがある。) 組み立て後にピンホールテストをしたとこ
ろ,件のダストは除去できていましたが,新たに小さいダストが無数に付着していました。
そこで,再び分解作業を行い,マニュアル指定のイソプロパノール(Isopropyl Alcohol)で拭きました。幅15mm厚さ0.8mmの軟質ポリエチレン
シートにシルボン紙を巻き付け,その先端を折り返してイソプロパノールを沁み込ませて,軽くひと刷けで拭き取りました。シルボン紙を
取り替えながら3回拭きました。組み立て後にピンホールテストをしたところ,大部分のダストは除去されていましたが,小さいダスト(影の
大きさと濃さで判断)が若干残っていました。拭く回数をさらに多くすべきでしたが,実用上は差し支えないものとしてクリーニング作
業を終えました。(クリーニング液の純度,空気中の浮遊ダストに注意)
[Multi-Star Guiding]
Download MultiGiuder13 (2/16/14)
上のプログラムはMaxIm DL用のPlug-in Softです。これは赤道儀を多数個の基準星を使って自動ガイドするもので,
John Winfield 氏の
Multi-Star Guiding Pluginに近いと思われるソースの資料を入手し,当方の動作環境(非ASCOM経由)でも使えるように修正・改良し
たものです。初版(4/18/13)はプライベートに試供し,その後,Dithering機能などを追加して公開(9/14/13)に踏み切りました。ただし,この無断転載を禁じます。
当方でMulti-Star Guideに興味を持ったのは以下のような理由によります。
地上で天体撮影をする限り,自動ガイド撮影では赤道儀のPM(Periodic Motion)や極軸の設置誤差などを補正してもガイド星自身のシンチレーションの影響を
受けます。AOなどを使って高速で追尾しようとしても,ガイド星の芯の揺らぎと目的とする星の芯の揺らぎの方向と大きさがいつも一致するとは限らないので
完全とは云えません。
ガイドカメラの短時間露光を繰り返して星像を観察してみると,多数の星がそれぞれ異なる方向へランダムに変位しているのが散見されます。
したがって,星像のぼやけの程度はガイド星の揺らぎの絶対値と星の揺らぎの絶対値が加算されたものとなることが予想されます。
この星像のぼやけを少なくするには,ガイド星の揺らぎの影響を低く抑える必要があります。ガイドカメラの露光時間を長くとることで
平均化されて安定したガイド星の芯を得ることはできますが,それでは追尾動作が間遠くなるために不都合が生じます。
そこで,多数個のガイド星を選びそれぞれの変位量を加算平均して制御に用いれば,露光時間が短くても同様の効果が得られ,
安定した追尾動作が期待できると考えたからです。
マニュアルの補足
このMulti-Star Guiderを使うにあたっては通常モードでの自動ガイドが支障なく使えていることが前提になります。
その上で自動ガイドの質を向上させるためのMaxIm DLの支援(Plug-in)ソフトとしてお使いください。
なお,これにより焦点距離が短い撮影系でも多数個の基準星による安定した自動ガイドが期待できます。
本Plug-inを実行する際にMSSTDFMT.DLLなどのファイルを要求されることがあります。マイクロソフト社のWEBサイトからダウンロードし
Windows\System32に入れて再び実行してください。HDに余裕があれば,ベクターのサイトからVisual Basic 6.0 SP6
ランタイムファイル(インストーラ付き)を入手して一括導入することも考えられます。
なお,Windows 7 64bit環境ではWindows\SysWOW64に入れる(REGSVR32で登録する)ことになります。
選択した多数個のガイド星からのオフセット(エラー)量はSN比により加重平均して制御に用いています。これはSN比が極端に低下
した星の変位をSN比がよい星の変位と同等に扱う訳にはいかないからです。一方,ある水準(2以上)のSN比をもつ星については
それぞれがランダムな揺らぎを含んでいるとして差別せずに加算平均処理しており,これと前者の方式を併用しています。
それぞれのSN比はCSVファイルから指定した星の順序で参照することができます。
赤道儀への補正出力はMaxImの標準方式に従っており,ASCOMやParallel Portへの出力指定も可能です(MaxImの基本仕様に依存する)。
ただし,DECとRAの同時補正出力については,対応していないドライブユニット(駆動回路)もあるのでサポートしていません。
対象天体の赤緯値については小窓からのキー入力としています。
 Dithering機能は偏移(Deviation)量をゼロ以外に設定することで適用されます。
ガイド星の基準点移動では各画像の独立性を確保するために12点(4x3の格子点)間の最短距離での移動をプログラムしています。
Dithering機能は偏移(Deviation)量をゼロ以外に設定することで適用されます。
ガイド星の基準点移動では各画像の独立性を確保するために12点(4x3の格子点)間の最短距離での移動をプログラムしています。
左の写真はアンドロメダ座β星付近をOrion300(f=1218mm) + G2-8300でテスト撮影したものの一部分です。
Deviation=1, 60秒露光のL画像9枚を位置合わせをせずに比較明でコンポジットしています。
自動ガイドはLodeStarをオフアキシスガイダーとして2x2binningで使っているので左の画面では約3pixels間隔の格子点になっています。
ステライメージ7のコンポジット・タブで詳細な移動量と相対位置を知ることもできます。偏移直後の追尾状況はCSVファイルで確認してください。
なお,Delay Betweenの待ち時間を短縮できるように一時的にAggressiveness=10(下記の2.を参照)で補正出力しています。
もし,この機能を使わない場合は設定小窓のInhibit Aggressive 10にチェックを入れてください。
一巡後は再び最初の基準点から始まります。Againでは初期状態にリセットし継続されます。狭い移動範囲内に収めるために12点に限定していますが,
それを超える独立した基準点を確保したい場合はAgainのdX, dY座標指定を併用してください。
ただし,このXY方向はガイドカメラに対するものであることに注意してください。また,SBIG STシリーズのセルフガイドなどで
構図のためにカメラを回転してセットする場合(X方向とRA方向とが異なる場合)は上記のチェックを入れるなどの注意が必要です。
なお,このPlug-in Softに不具合や不明な点があれば下記にご連絡ください。
自動ガイドの要点 について列挙してみます。
1.制御信号の赤道儀(ドライバ)への配線
赤道儀への補正出力の配線はガイダーのX軸出力がRA制御,同Y軸出力がDEC制御にそれぞれ対応している必要があります。
もし,この接続が異なっているとRA制御の赤緯値による補正は正常に機能しません。
ガイドカメラのセッティングも含めて,RA駆動を恒星時速度から速めたり遅らせたりした時にガイダーの星像がX軸方向
(モニタ上では左右方向)に振れるようになっている必要があります。補正速度は恒星時の0.1~0.5倍速が推奨されます(当方では0.25倍速)。
2.キャリブレーション
MaxImのマニュアルに従ってキャリブレーションする訳ですが,精度を考慮して通常は赤緯0度付近で行います。もちろん,その時の赤緯値をScope DECに入力します。
基準星の移動量が数十ピクセルになるようにCal. Timeを指定し実施します(二度続けて実行するとバックラッシュによる悪影響を防ぐことができる)。
その結果について,Gide Tab--SettingでManual CalibrationのX-SpeedとY-Speedとを比較してみると,後者の方が絶対値で
かなり小さくなっていることがあります。これはDEC軸駆動のバックラッシュに起因しており,その状態のままで自動ガイド(追尾)を実行すると
Y軸方向の暴れ(ハンチング)が発生します。
AggressivenessYを小さくすることでもこの暴れを抑えることはできますが,マニュアル操作でY-SpeedをX-Speedの数値で書き換えることを勧めます。
ついでに,Angle(deg)もキリのよい値に丸めておくことも勧めます。
3.再キャリブレーション
上記の要領で一度キャリブレーションしておけば,対象天体が替わっても改めてキャリブレーションすることなく,その赤緯値を入力する
だけで正常に追尾することができます。また,ガイドカメラを再セッティングしたとしても新たにキャリブレーションすることなく
自動ガイドできます(Angleの値を丸める理由)。
また,ガイド鏡の焦点距離を変えても比例計算によりX-Speedを求めてマニュアル操作でX, Y-Speedにそれぞれ設定することも可能です。
加えて,オフアキ等ではガイドカメラを主軸回りに回転してもその光軸回りに捻ることで,1.の条件を満たせば
再キャリブレーション無しで使えることになります。
4.MaxImのバージョンの違いについて
Ver.4.xxからVer.5.xxへのバージョンアップで色々と追加されて使い易くなってはいますが,上で述べたSpeedの定義が変更されたので
注意が必要です。Ver.5.xxでは2x2 Binningでも1x1と全く同じSpeedに換算されています。つまり,どのBinningでキャリブレーションしていても
任意のBinningでそのまま使うことができます。便利に使えるように進歩したと云えなくもないですが,この仕様変更は本Multi-Star Guiderにとっ
ては致命的であり,バージョン番号を読み取って両者に対応しました。なお,本ガイダーはMaxIm DL Ver.5.23の環境でVB6を使ってコンパイルしています。
5.メカニカルな問題
ガイドソフトからの制御信号に対し赤道儀が的確に応答できるかどうかについては本質的で厄介な問題があります。
ソフトウェアについてはユーザから見ればブラックボックス状態ですが,説明書などの理解が進めば解決は容易です。
しかし,メカニカルな要素については個別に実体を把握できたとしても問題解決には困難が伴います。
例えば,DEC軸駆動のバックラッシュが大きいためにガイドエラーが発生することが判ったとしても
バックラッシュを小さくすることは非常に難しい等々です。また,DEC軸のマイクロステップ駆動で静止時の電流がゼロか非常に小さいために
微動時の応答性が悪い場合もあります。
当方ではFORNAX 51とFS2の組み合わせでローコストながら一応のレベルを確保できており,これで本Plug-inの動作を評価していますが,
皆さんの環境でそれぞれに対策を講じてください。
to home